


Related Industry: Aerospace

Portable phased aperture array antenna – 11245185

Robust cooperative localization and navigation of tethered heterogeneous autonomous unmanned vehicles in resource-constrained environments – 11148802

Solar-powered mobile escalator – 10717546

High control authority variable speed control moment gyroscopes – 10202208
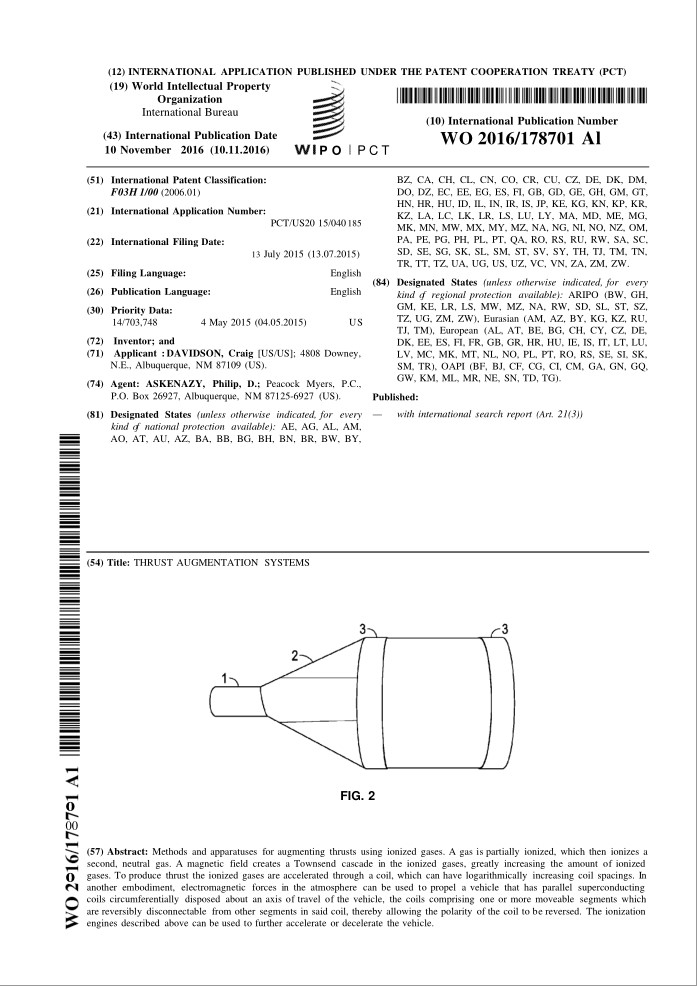
Thrust Augmentation Systems – WO 2016/178701

Biplanar cube unidirectional ring laser gyroscope – 5650850

Nuclear reactor refuelable in space – 5106574

Creating and identifying synthetic aperture radar images having tilt angle diversity – 7015855

Fire alarm algorithm using smoke and gas sensors – 7142105

Surface cleaning vehicle – 7735186

Acceleration activated fin release mechanism – 7851734

Portable evaluation of window transmission – 7880885

Electronic curtain for vehicle protection – 8098191
